Automatic multi-view lidar registration tool-1
Light detection and ranging (lidar) can be used to accurately estimate forest structure attributes using the rich three-dimensional (3D) information within the lidar point clouds, and has been proven to be highly useful for forest inventory practices. Currently, airborne, unmanned aerial vehicle (UAV)-borne, mobile, and terrestrial lidar systems are the most commonly used lidar platforms in forest-related applications.
However, each of these lidar platforms has its own limitations. The down-looking airborne and UAV-borne lidar data can provide highly accurate tree canopy information, but lack tree trunk information; mobile lidar systems (e.g., backpack lidar) can provide detailed tree trunk information, but the limited vertical field of view and measurement range may result in the miss of upper canopy information; single-location scans of terrestrial laser scanning (TLS) suffer from the occlusion effect of branches and leaves, and the registration of multi-scan lidar data can be highly time-consuming. The fusion of multi-platform lidar data has the potential to provide an ultimate solution to address the limitations of each lidar platform. However, due to the complexity and irregularity of the forest environment, there is a lack of robust geometric features in the forest for automatic registration of multi-source lidar data. How to register multi-source lidar data automatically in a forest environment remains to be a challenge.
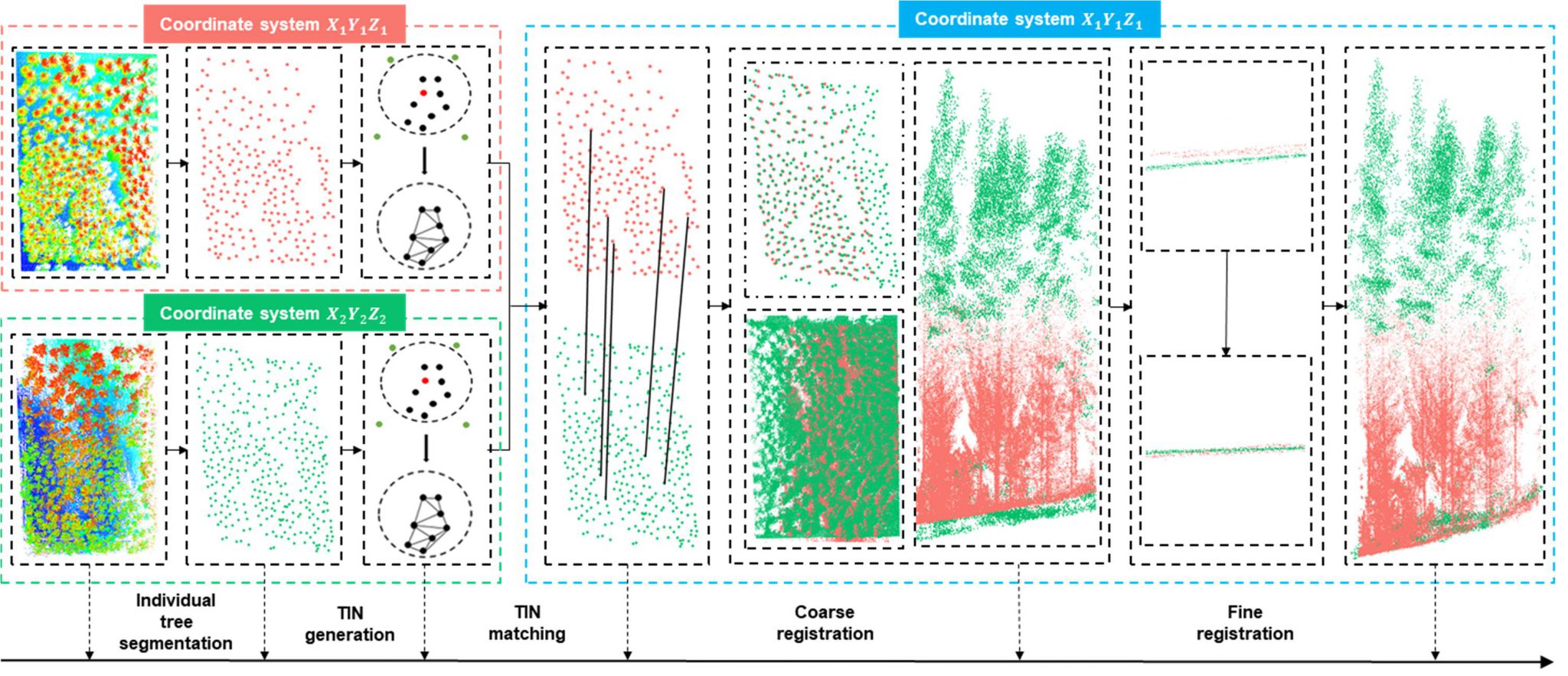
Based on the assumption that each forest stand has a unique spatial distribution of trees, the research group successfully achieved the automatic fusion of UAV and backpack lidar data by using tree locations as the key registration features. Five steps are included in the proposed method, i.e. individual tree segmentation, triangulated irregular network (TIN) generation, TIN matching, coarse registration, and fine registration. TIN matching, as the essential step to find corresponding tree pairs from multi-platform lidar data, uses a voting strategy based on the similarity of triangles composed of individual tree locations. After TIN matching, the identified tree pairs can be used to coarsely match the target point cloud to the source point cloud, and the final registration result could be obtained by running an ICP-based fine registration process. This work effectively overcome the limitation of single lidar platforms and lays the foundation for efficient, dynamic, and accurate forest inventory.

Reference
Guan Hongcan, Su Yanjun , Hu Tianyu, Wang Rui, Ma Qin, Yang Qiuli, Sun Xiliang, Li Yumei, Jin Shichao, Zhang Jing, Ma Qin, Liu Min, Wu Fayun, Guo Qinghua. 2020. A Novel Framework to Automatically Fuse Multi-platform Lidar Data in Forest Environments Based on Tree Locations. IEEE Transactions on Geoscience and Remote Sensing.58(3): 2165-2177.
 Automatic multi-view lidar registration tool
Automatic multi-view lidar registration tool